3d incremental local replanning
We proposed Dynamic Z algorithm 6 7 as an incremental version of Z algorithm 8 for energy-efficient path planning and replanning. Our al-gorithm builds upon recent advances in 2D grid-based path planning and extends these techniques to 3D grids.

Pdf Ego Planner An Esdf Free Gradient Based Local Planner For Quadrotors Semantic Scholar
Occupancy maps are a common representation for plan-ning.
. One of the most popular 3D occupancy maps is called. Check out whos hiring this week in the Huntington area. 2 HOFER ET AL.
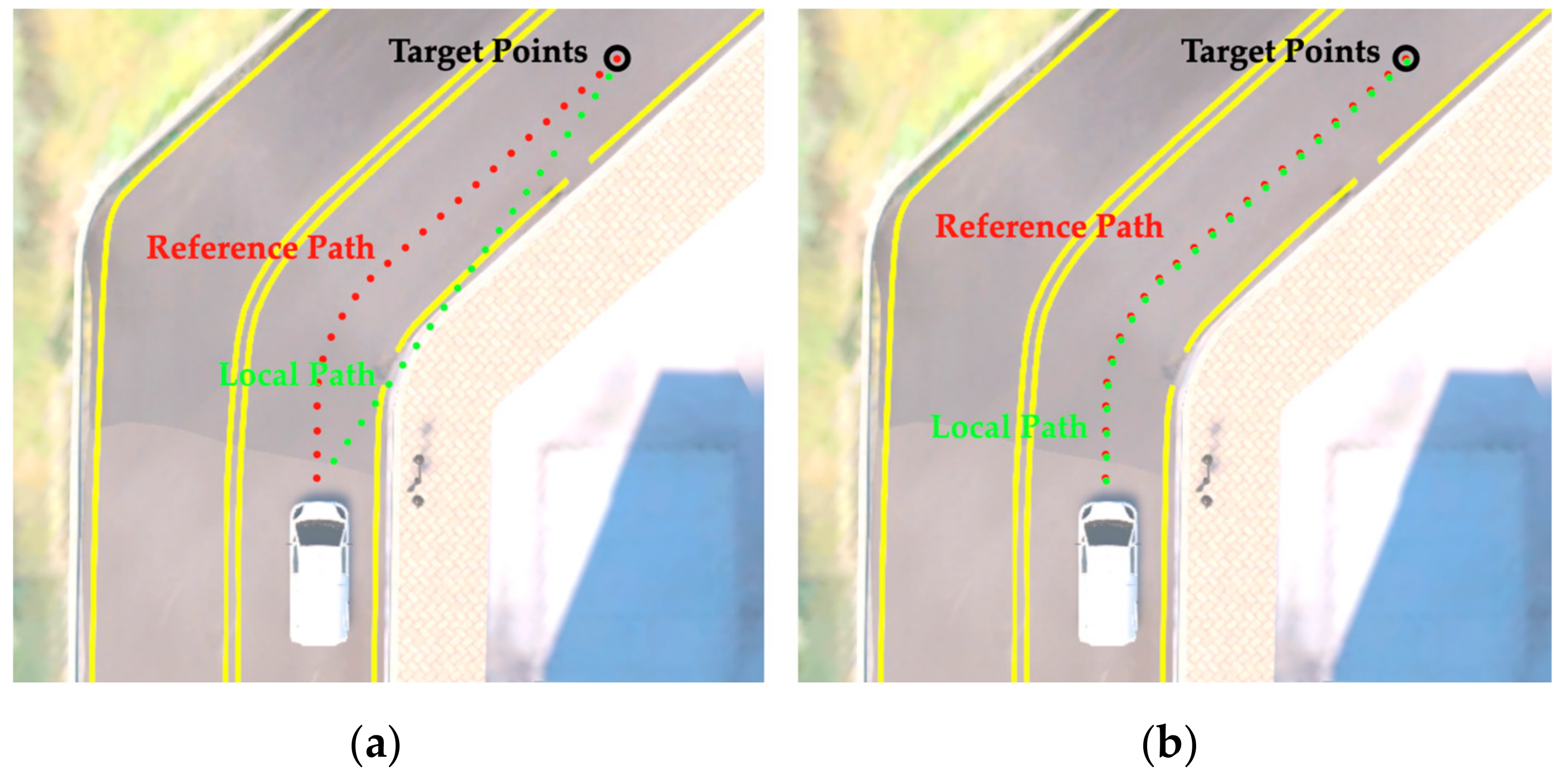
Asharoken is private but the fireworks display is set off on a barge in the Long Island Sound. As far as we know incremental heuristic search methods have not yet been applied to the problem of. 2 Local Waypoints Adaptation.
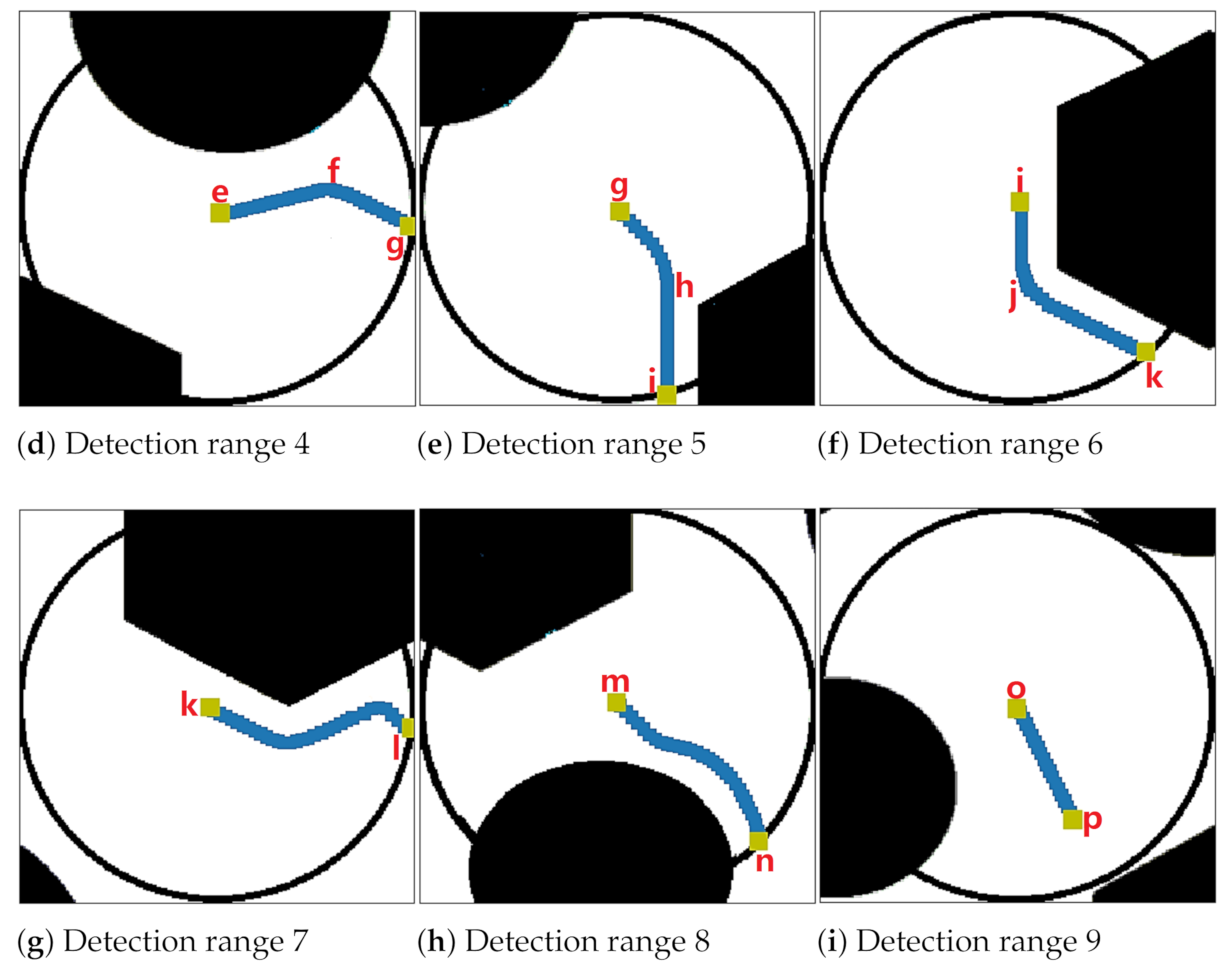
As we can see the density of the reconstruction improves significantly when more images are. The local trajectory replanning is performed at 05 s intervals until reaching the target point. TLPA an incremental search algorithm that speeds up replanning by using a suboptimality bound to limit re-expansions.
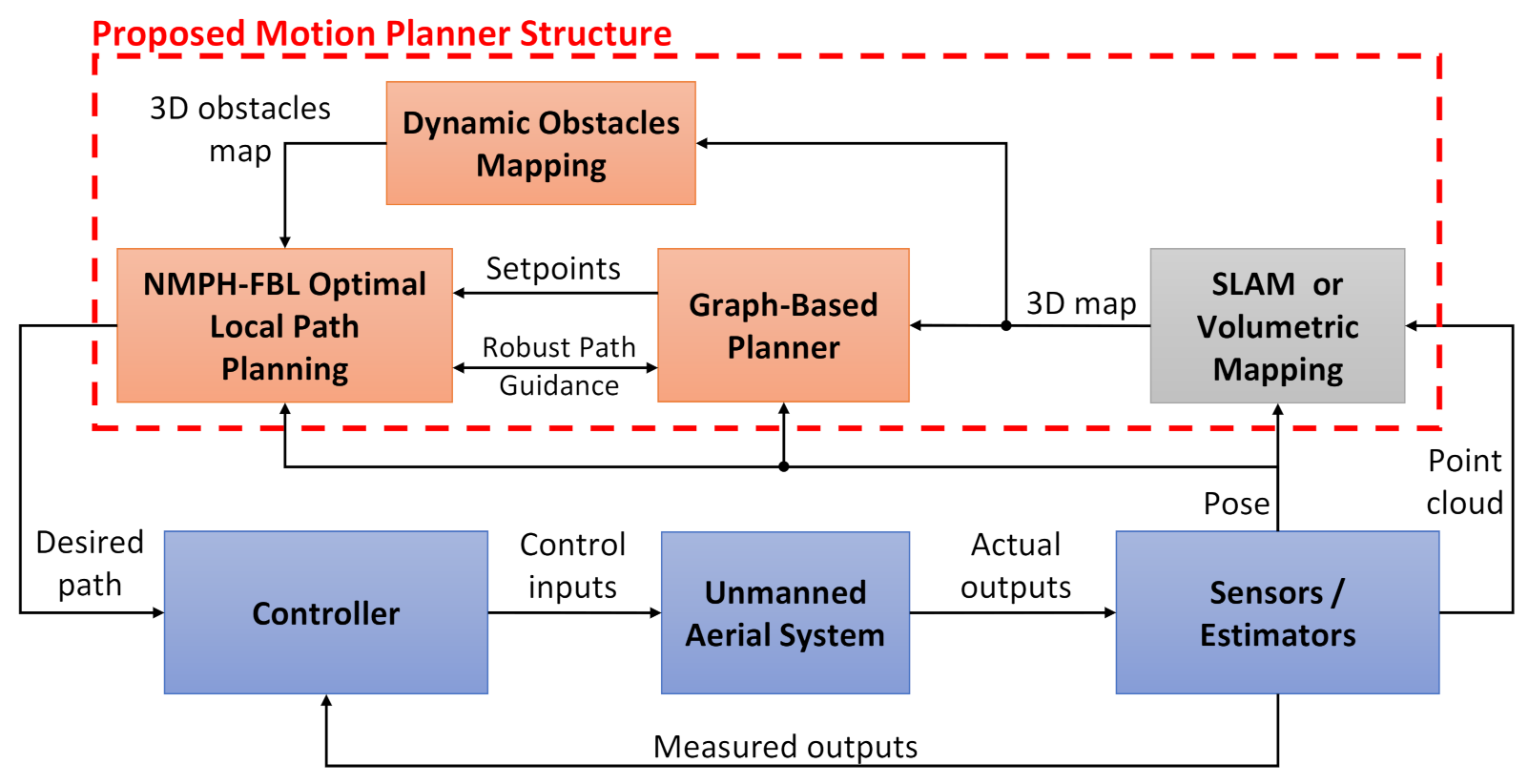
Up to 10 cash back In this work we aim to develop a fast trajectory replanning methodology enabling highly agile aerial vehicles to navigate in cluttered environments. As for the local waypoints adaptation method ITOMP 14 interleaves of planning and execution using the prediction of environment change for real-time replanning. INCREMENTAL LINE-BASED 3D RECONSTRUCTION.
2 D Lite Replanning Method D Lite 9 shown in Figure 1 is an incremental version of the heuristic search method A and combines ideas. Replanning algorithm that is able to produce direct low-cost paths through three-dimensional environments. The local replanning algorithm is running at a rate of 4 Hz while the global planner using Informed RRT with polynomial smoothing runs.
It is often the case for robots navigating in full three-dimensional environments that moving in some directions is. Tility and computational benefits of incremental heuristic search for mapping of unknown terrain we hope that this underexploited technique will be used more often in mo-bile robotics. By focusing on reducing complexity and accelerating the replanning problem under strict dynamical constraints we employ the b-spline theory with local support property for.
Pute a conservative local bound on the position or trajectory of each obstacle over a short time and use the bound to com-pute a collision-free trajectory for the robot in an incremental manner. Our method first reconstructs an initial 3D model by selecting. At the end making incremental updating impossible.
Up to 10 cash back We present a novel algorithm for 3D reconstruction in this paper converting incremental 3D reconstruction to an optimization problem by combining two feature-enhancing geometric priors and one photometric consistency constraint under the Bayesian learning framework. Incremental heuristic search methods can often replan paths much faster than incremental or heuristic search methods individually yet are simple to use. Tility and computational benefits of incremental heuristic search for mapping of unknown terrain we hope that this underexploited technique will be used more often in mo-bile robotics.
Further we show how an incremental planner can be adapted to reduce the overhead incurred for replanning. Other alternative approaches 25 26 maintain a global 3D model calculated from sparse 3D feature points via De-launay triangulation and free-space carving. Through simulation experiments and comparison with existing methods we verify the effectiveness of the method we proposed.
Replanning using these maps on-board an MAV. In our weekly collab with ZipRecruiter you can check out all the companies hiring. Improving Incremental Planning Performance through Overlapping Replanning and Execution.
The incremental 3D line modelling procedure is illustrated for the Sign sequence. Moreover we interleave planning and execution of the robot in an adaptive manner to balance between the plan-ning horizon and responsiveness to obstacle. The images show the result after 15 and the full 48.
TLPA only propagates the cost changes when it is essential to ensure the suboptimality bound and reuses the previous search values for all other states. 2 D Lite Replanning Method D Lite 9 shown in Figure 1 is an incremental version of the heuristic search method A and combines ideas. And while local replanning has also been recently addressed in literature most work is shown on very low-density environments and makes optimistic assumptions about the environment for example.
In this work we show how incremental planning can be incorporated into the formulation of optimized trajectories from roadmap seed trajectories. July 4 Festivities. When new fea-tures are added the model is updated according to the free-space consistency.
So far they have only been used in mobile robotics to move a robot to given goal coordinates in unknown terrain. This paper presents an incremental search algorithm called Rapidly Replanning A RRA as a generalization of Dy-namic Z 7 which can be used for optimal path planning and replanning on finite digraphs. The incremental 3D line modelling procedure is illustrated for the Sign sequence.
However these methods only fuse new. This paper describes how to apply the incremental heuristic search method D Lite that combines ideas from Lifelong Planning A and Focussed D to mapping unknown terrain which is rather nontrivial and compares its runtime against that of incremental search and heuristicsearch alone demonstrating the computational benefits of their combination. The images show the result after 15 and the full 48 images together with the sparse 3D point cloud.
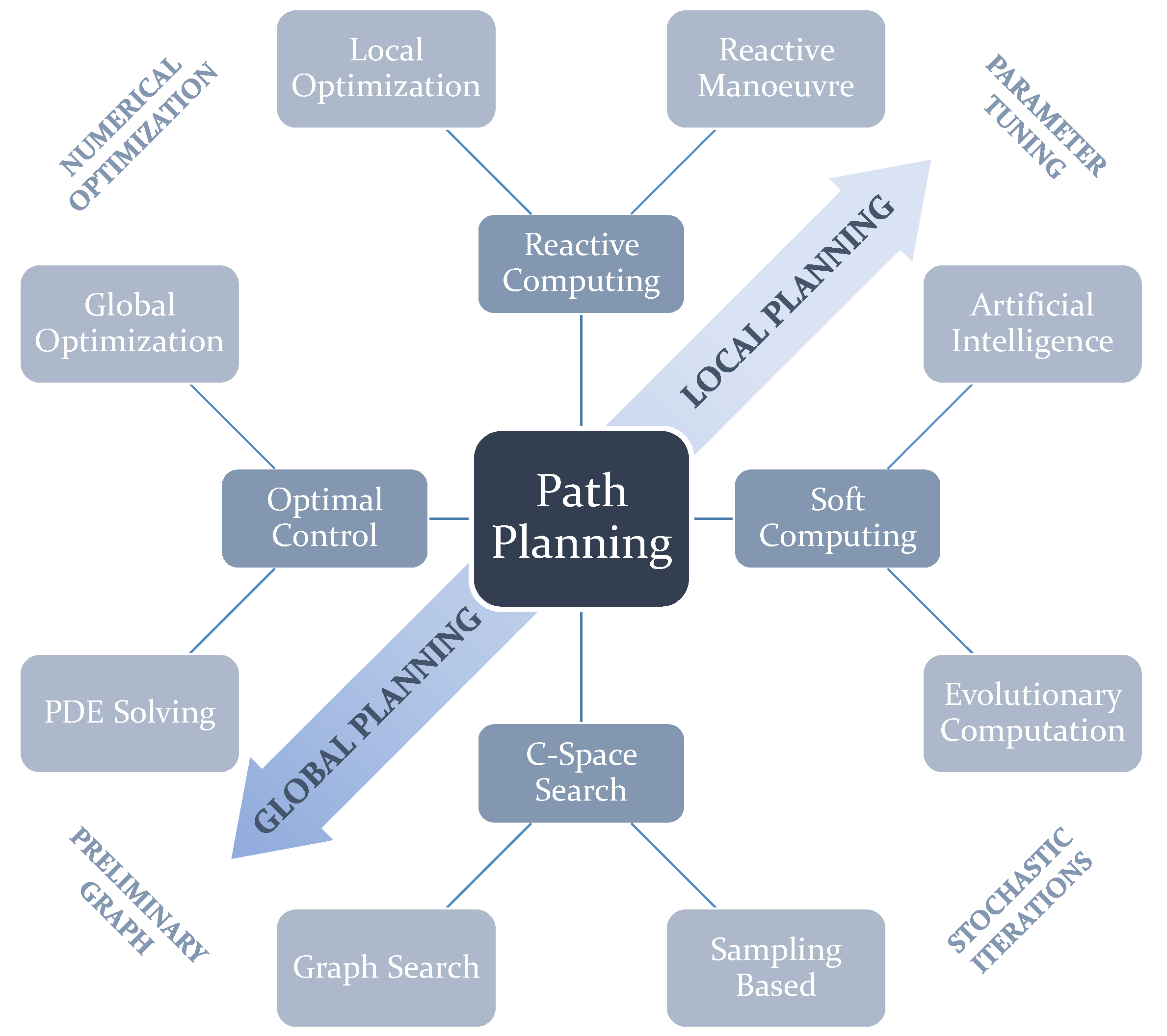
As a result it can substantially improve the replanning runtime. RELATED WORK This section gives a brief overview of different map rep-resentations used for planning and existing work in building ESDFs and TSDFs.
2

Pdf Ego Planner An Esdf Free Gradient Based Local Planner For Quadrotors Semantic Scholar
Applied Sciences Free Full Text Path Planning And Collision Avoidance In Unknown Environments For Usvs Based On An Improved D Lite Html

Pdf Ego Planner An Esdf Free Gradient Based Local Planner For Quadrotors Semantic Scholar
Applied Sciences Free Full Text Online Local Path Planning On The Campus Environment For Autonomous Driving Considering Road Constraints And Multiple Obstacles Html
Sensors Free Full Text Optimal Motion Planning In Gps Denied Environments Using Nonlinear Model Predictive Horizon Html
2

Pdf Ego Planner An Esdf Free Gradient Based Local Planner For Quadrotors Semantic Scholar

Pdf Ego Planner An Esdf Free Gradient Based Local Planner For Quadrotors Semantic Scholar

Pdf An Efficient B Spline Based Kinodynamic Replanning Framework For Quadrotors Semantic Scholar
Sensors Free Full Text Path Planning For Autonomous Mobile Robots A Review Html

Pdf Tare A Hierarchical Framework For Efficiently Exploring Complex 3d Environments

Teach Repeat Replan A Complete And Robust System For Aggressive Flight In Complex Environments Arxiv Vanity
Actuators Free Full Text Path Planning For Automatic Guided Vehicles Agvs Fusing Mh Rrt With Improved Teb Html

Illustration Of Local Spatiotemporal Planning The Top Plot Download Scientific Diagram

The Cvar A Local Piecewise Linear Utility Function For A Fixed Revenue Download Scientific Diagram

Illustration Of Local Spatiotemporal Planning The Top Plot Download Scientific Diagram

Graph Based Subterranean Exploration Path Planning Using Aerial And Legged Robots Dang 2020 Journal Of Field Robotics Wiley Online Library

Www Keralites Net A Day In The Suffocating Life Of A Mumbai Commuter